
La famille des PIC32 est la plus récente et la plus puissante (les autres étant les PIC16 et les PIC24), ses microcontrôleurs possèdent entre autre un jeux d’instruction sur 32 bits.
Seulement quelques versions de la famille PIC32 se présentent sous la forme d’un boîtier DIP muni de 28 broches, ce qui permet de les tester facilement sur une plaque d’essai (breadboard). Les autres sont des boîtiers TQFP comprenant 64 ou 100 broches, qui sont soudés en CMS (composant monté en surface, donc non-traversant) sur un adaptateur pour les utiliser, ce qui est souvent une aventure au vu du faible écart entre les broches.

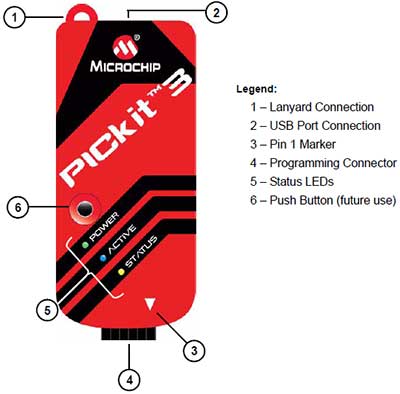
On programme un PIC avec un PICKit 3, c’est un boîtier rouge muni d’un câble USB relié au PC et de 6 fils reliés au broches du microcontrôleur. Le transfert des données de l’ordinateur vers le PIC de fait par ICSP (In-Circuit Serial Programming) : les données du programme sont poussées dans la mémoire ROM.
Comme toute connexion série, il y a une broche pour les données (PGED) et une broche pour l’horloge (PGEC), le PIC a aussi besoin d’être alimenté via ses broches AVSS (GND) et AVDD (+3.3V). Enfin, ne pas oublier d’ajouter quelques composants passifs autour du microcontrôleur : un condensateur céramique (10uF) et une résistance de pull-up (10K).
Le programme est codé sur MPLAB X IDE en C++, il est possible d’utiliser des breakpoints pour déboger plus finement le code. Une fois la compilation effectuée (et sans erreurs), il ne reste plus qu’à le transférer le programme sur le PIC.
